当前位置:
X-MOL 学术
›
Adv. Funct. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
具有层状表面相互作用的胶体凝胶的表面形态、粘附力和摩擦力的控制
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2023-04-06 , DOI: 10.1002/adfm.202300896 Alexander Deptula 1 , Jessica Rangel‐Galera 1 , Rosa M. Espinosa‐Marzal 1, 2
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2023-04-06 , DOI: 10.1002/adfm.202300896 Alexander Deptula 1 , Jessica Rangel‐Galera 1 , Rosa M. Espinosa‐Marzal 1, 2
Affiliation
|
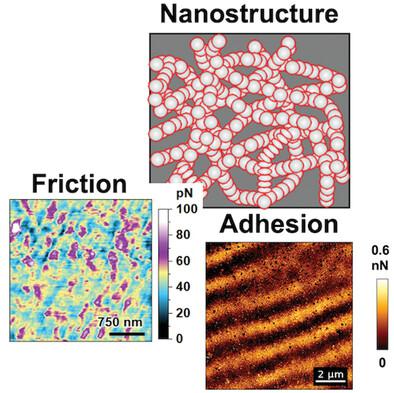
尽管聚电解质系统最近取得了进展,但设计响应性水凝胶界面以满足应用要求仍然具有挑战性。在此,研究了由聚(甲基丙烯酰胺-甲基丙烯酸)组成的半结晶胶体凝胶在水中的储能模量在 MPa 范围内。SEM、X 射线散射和 NMR 的结合揭示了不同单体比例下胶体微观结构、结晶度和氢键的演变。具有最精细胶体微观结构的凝胶表现出最耗散的流变行为,并被选择用于研究其界面特性和潜在的相互作用。微观结构稳定性和动力学源于短程(吸引力)氢键和疏水力,和长程(排斥)静电相互作用——“SALR”对势。此外,凝胶的表面呈现出亚微米胶体形貌,由于胶体网络的粘弹性变形,很大程度上决定了(类胶体)摩擦,而静电近表面相互作用以层状粘附传播。所涉及的相互作用的动态和可逆性质引入了刺激响应行为,从而实现了粘附和摩擦的电可调性。这项研究推进了设计复杂水凝胶界面所需的知识,这些界面能够实现表面特性的空间和动态控制,这与生物医学设备、软组织设计、软机器人和其他工程摩擦系统的应用相关。凝胶的表面呈现出亚微米胶体形貌,由于胶体网络的粘弹性变形,很大程度上决定了(类胶体)摩擦力,而静电近表面相互作用以层状粘附的形式传播。所涉及的相互作用的动态和可逆性质引入了刺激响应行为,从而实现了粘附和摩擦的电可调性。这项研究推进了设计复杂水凝胶界面所需的知识,这些界面能够实现表面特性的空间和动态控制,这与生物医学设备、软组织设计、软机器人和其他工程摩擦系统的应用相关。凝胶的表面呈现出亚微米胶体形貌,由于胶体网络的粘弹性变形,很大程度上决定了(类胶体)摩擦力,而静电近表面相互作用以层状粘附的形式传播。所涉及的相互作用的动态和可逆性质引入了刺激响应行为,从而实现了粘附和摩擦的电可调性。这项研究推进了设计复杂水凝胶界面所需的知识,这些界面能够实现表面特性的空间和动态控制,这与生物医学设备、软组织设计、软机器人和其他工程摩擦系统的应用相关。而静电近表面相互作用则在层状粘附中传播。所涉及的相互作用的动态和可逆性质引入了刺激响应行为,从而实现了粘附和摩擦的电可调性。这项研究推进了设计复杂水凝胶界面所需的知识,这些界面能够实现表面特性的空间和动态控制,这与生物医学设备、软组织设计、软机器人和其他工程摩擦系统的应用相关。而静电近表面相互作用则在层状粘附中传播。所涉及的相互作用的动态和可逆性质引入了刺激响应行为,从而实现了粘附和摩擦的电可调性。这项研究推进了设计复杂水凝胶界面所需的知识,这些界面能够实现表面特性的空间和动态控制,这与生物医学设备、软组织设计、软机器人和其他工程摩擦系统的应用相关。

"点击查看英文标题和摘要"
更新日期:2023-04-06
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号