Artificial Life and Robotics Pub Date : 2023-03-30 , DOI: 10.1007/s10015-023-00861-3 Susumu Yamashita , Kazuyuki Ito
|
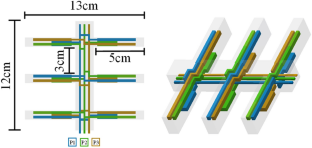
In recent years, soft robotics composed of soft silicone rubber have attracted significant attention, as they can adapt to various unknown environments owing to their flexible bodies, resulting into a variety of robots. In our previous work, we focused on robots that operate in real complex environments, such as rescue robots, agriculture robots, and contracting robots, and developed various flexible robots such as octopus-like manipulators, pipe-climbing robots, and wall-climbing robots. In this study, we aimed to develop a multi-legged soft robot that can move in various types of surfaces, and then we employed a layered structure for the robot body to assemble it easily. We developed an actual robot and conducted experiments to confirm its mobility in three environments: a horizontal board, pebbles, and water. As a result, we confirmed that the desired crawling motion was realized and the proposed robot could move in various types of surfaces by using the dynamics of its soft body. Additionally, this study confirmed that the designed soft robot works as an integrated system, that is, the soft body simultaneously works as a structure, actuator, sensor, and controller.
中文翻译:
六足爬行软体机器人:NOBIYAKA
近年来,由软硅橡胶制成的软体机器人因其灵活的身体可以适应各种未知环境而受到广泛关注,从而产生了各种各样的机器人。在前期工作中,我们专注于在真实复杂环境中作业的机器人,如救援机器人、农业机器人、承包机器人等,开发了类章鱼机械手、爬管机器人、爬墙机器人等多种柔性机器人。 . 在这项研究中,我们的目标是开发一种可以在各种类型的表面移动的多足软体机器人,然后我们为机器人身体采用了分层结构,以便于组装。我们开发了一个实际的机器人并进行了实验以确认其在三种环境中的移动性:水平板、鹅卵石和水。因此,我们确认实现了所需的爬行运动,并且所提出的机器人可以利用其软体的动力学在各种类型的表面上移动。此外,这项研究证实,所设计的软体机器人作为一个集成系统工作,即软体同时作为结构、执行器、传感器和控制器工作。





























 京公网安备 11010802027423号
京公网安备 11010802027423号