Knee Surgery, Sports Traumatology, Arthroscopy ( IF 3.3 ) Pub Date : 2023-03-25 , DOI: 10.1007/s00167-023-07386-z Claudio Glowalla 1, 2 , Severin Langer 1, 2 , Ulrich Lenze 1 , Igor Lazic 1 , Michael T Hirschmann 3 , Florian Hinterwimmer 1 , Rüdiger von Eisenhart-Rothe 1 , Florian Pohlig 1
|
Purpose
Robotic arm-assisted total knee arthroplasty (raTKA), currently a major trend in knee arthroplasty, aims to improve the accuracy of implant positioning and limb alignment. However, it is unclear whether and to what extent manual radiographic and navigation measurements with the MAKO™ system correlate. Nonetheless, a high agreement would be crucial to reliably achieve the desired limb alignment.
Methods
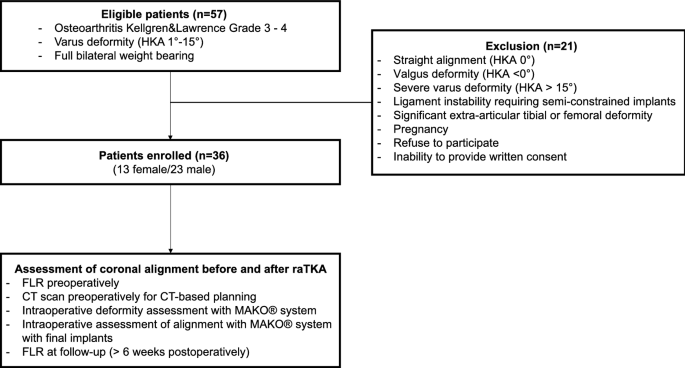
Thirty-six consecutive patients with osteoarthritis and a slight-to-moderate varus deformity undergoing raTKA were prospectively included in this study. Prior to surgery and at follow-up, a full leg radiograph (FLR) under weight-bearing conditions was performed. In addition, a computed tomography (CT) scan was conducted for preoperative planning. The hip–knee–ankle angle (HKA), mechanical lateral distal femur angle (mLDFA), mechanical medial proximal tibial angle (mMPTA) and joint line convergence angle (JLCA) were measured in the preoperative and follow-up FLR as well as in the CT scout (without weight-bearing) by three independent raters. Furthermore, the HKA was intraoperatively assessed with the MAKO™ system before and after raTKA.
Results
Significantly higher HKA values were identified for intraoperative deformity assessment using the MAKO system compared to the preoperative FLR and CT scouts (p = 0.006; p = 0.05). Intraoperative assessment of the HKA with final implants showed a mean residual varus deformity of 3.2° ± 1.9°, whereas a significantly lower residual varus deformity of 1.4° ± 1.9° was identified in the postoperative FLR (p < 0.001). The mMPTA was significantly higher in the preoperative FLR than in the CT scouts (p < 0.001). Intraoperatively, the mMPTA was adjusted to a mean of 87.5° ± 0.9° with final implants, while significantly higher values were measured in postoperative FLRs (p < 0.001). Concerning the mLDFA, no significant differences could be identified.
Conclusion
The clinical importance of this study lies in the finding that there is a difference between residual varus deformity measured intraoperatively with the MAKO™ system and those measured in postoperative FLRs. This has implications for preoperative planning as well as intraoperative fine-tuning of the implant position during raTKA to avoid overcorrection of knees with slight-to-moderate varus osteoarthritis.
Level of evidence
Level IV.
中文翻译:
与使用 MAKO™ 系统进行机械臂辅助全膝关节置换术的术中测量相比,术后全腿 X 光片表现出较少的残余冠状内翻畸形
目的
机械臂辅助全膝关节置换术(raTKA)是目前膝关节置换术的一大趋势,旨在提高植入物定位和肢体对齐的准确性。然而,尚不清楚手动放射线照相和导航测量与 MAKO™ 系统是否相关以及在何种程度上相关。尽管如此,高度一致对于可靠地实现所需的肢体对齐至关重要。
方法
本研究前瞻性地纳入了 36 名连续接受 raTKA 治疗的患有骨关节炎和轻度至中度内翻畸形的患者。手术前和随访时,在负重条件下进行全腿X光检查(FLR)。此外,还进行了计算机断层扫描(CT)扫描以进行术前计划。在术前和随访 FLR 以及术后测量髋膝踝角 (HKA)、股骨远端机械外侧角 (mLDFA)、胫骨近端机械内侧角 (mMPTA) 和关节线会聚角 (JLCA)。由三位独立评估员进行的 CT 侦察(无负重)。此外,在 rTKA 前后使用 MAKO™ 系统对 HKA 进行了术中评估。
结果
与术前 FLR 和 CT 侦察相比,使用 MAKO 系统进行术中畸形评估时发现 HKA 值显着较高(p = 0.006;p = 0.05)。最终种植体 HKA 的术中评估显示,平均残余内翻畸形为 3.2° ± 1.9°,而术后 FLR 发现残余内翻畸形明显较低,为 1.4° ± 1.9° ( p < 0.001 ) 。术前 FLR 中的 mMPTA 显着高于 CT 侦察中的 ( p < 0.001)。术中,最终种植体将 mMPTA 调整为平均值 87.5° ± 0.9°,而术后 FLR 测得的值明显更高 ( p < 0.001)。关于 mLDFA,没有发现显着差异。
结论
这项研究的临床重要性在于发现术中使用 MAKO™ 系统测量的残余内翻畸形与术后 FLR 测量的残余内翻畸形之间存在差异。这对于术前计划以及 raTKA 期间植入物位置的术中微调具有重要意义,以避免患有轻度至中度内翻骨关节炎的膝盖过度矫正。
证据级别
四级。






























 京公网安备 11010802027423号
京公网安备 11010802027423号