当前位置:
X-MOL 学术
›
Adv. Funct. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
高导电 MXene/PEDOT:PSS 集成聚(N-异丙基丙烯酰胺)水凝胶,用于仿生体感软致动器
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2023-03-10 , DOI: 10.1002/adfm.202214867 Pan Xue 1 , Cristian Valenzuela 1 , Shaoshuai Ma 1 , Xuan Zhang 1 , Jiazhe Ma 1 , Yuanhao Chen 1 , Xinhua Xu 1 , Ling Wang 1
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2023-03-10 , DOI: 10.1002/adfm.202214867 Pan Xue 1 , Cristian Valenzuela 1 , Shaoshuai Ma 1 , Xuan Zhang 1 , Jiazhe Ma 1 , Yuanhao Chen 1 , Xinhua Xu 1 , Ling Wang 1
Affiliation
|
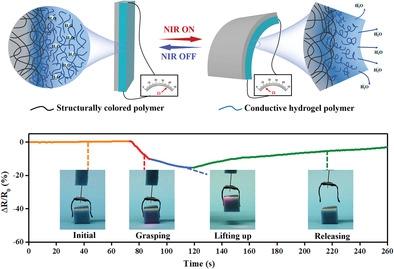
自然界中许多生物体的复杂传感和驱动能力激发了科学家们开发仿生体感软体机器人的灵感。在此,报道了用于仿生体感软致动器的均质和高导电水凝胶的设计和制造。导电水凝胶是通过导电表面功能化 MXene/聚(3,4-乙烯二氧噻吩)/聚(苯乙烯磺酸盐)油墨与热响应聚(N-异丙基丙烯酰胺)水凝胶的原位共聚合成的。发现所得水凝胶具有高电导率(11.76 S m -1)、应变灵敏度(GF 为 9.93)、宽工作应变范围(≈560% 应变)以及在 100% 应变下超过 300 次加载-卸载循环后的高稳定性。重要的是,通过将导电水凝胶与结构有色聚合物化学集成,开发出具有快速响应、光驱动远程控制和自感知能力的形状可编程体感水凝胶致动器。作为概念验证图,结构彩色水凝胶致动器用于设计人造章鱼、人造鱼和可通过实时电阻变化同时监测自身运动的软抓手的光驱动可编程形状变形. 这项工作有望为具有自我感知和驱动能力的先进体感材料的设计提供新的见解,

"点击查看英文标题和摘要"
更新日期:2023-03-10
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号