Nature Communications ( IF 14.7 ) Pub Date : 2023-03-07 , DOI: 10.1038/s41467-023-36819-z Hongri Gu 1, 2 , Marino Möckli 1 , Claas Ehmke 1 , Minsoo Kim 1 , Matthias Wieland 1 , Simon Moser 1 , Clemens Bechinger 2 , Quentin Boehler 1 , Bradley J Nelson 1
|
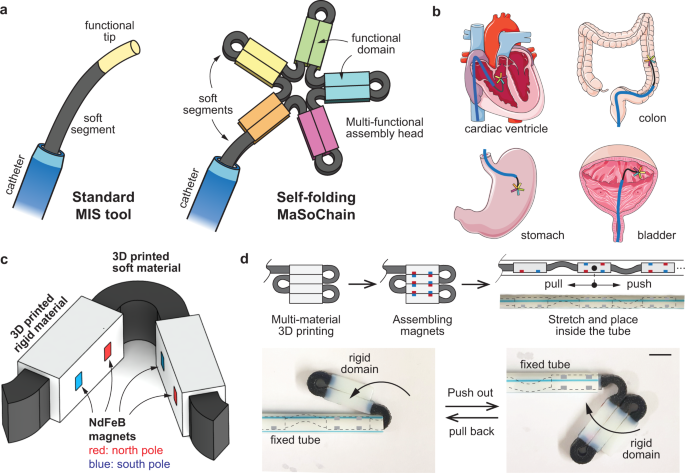
Magnetic continuum soft robots can actively steer their tip under an external magnetic field, enabling them to effectively navigate in complex in vivo environments and perform minimally invasive interventions. However, the geometries and functionalities of these robotic tools are limited by the inner diameter of the supporting catheter as well as the natural orifices and access ports of the human body. Here, we present a class of magnetic soft-robotic chains (MaSoChains) that can self-fold into large assemblies with stable configurations using a combination of elastic and magnetic energies. By pushing and pulling the MaSoChain relative to its catheter sheath, repeated assembly and disassembly with programmable shapes and functions are achieved. MaSoChains are compatible with state-of-the-art magnetic navigation technologies and provide many desirable features and functions that are difficult to realize through existing surgical tools. This strategy can be further customized and implemented for a wide spectrum of tools for minimally invasive interventions.
中文翻译:
具有可重构形状和功能的自折叠软机器人链
磁性连续体软机器人可以在外部磁场下主动操纵其尖端,使其能够在复杂的体内环境中有效导航并进行微创干预。然而,这些机器人工具的几何形状和功能受到支撑导管内径以及人体自然孔道和入口的限制。在这里,我们提出了一类磁性软机器人链 (MaSoChains),它可以使用弹性和磁能的组合自行折叠成具有稳定配置的大型组件。通过相对于其导管鞘推拉 MaSoChain,实现具有可编程形状和功能的重复组装和拆卸。MaSoChains 与最先进的磁导航技术兼容,并提供许多现有手术工具难以实现的理想特性和功能。可以针对广泛的微创干预工具进一步定制和实施该策略。






























 京公网安备 11010802027423号
京公网安备 11010802027423号