当前位置:
X-MOL 学术
›
Inorg. Chem.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Recoverable Dual-Modal Responsive Sensing Materials Based on Mechanoluminescence and Thermally Stimulated Luminescence toward Noncontact Tactile Sensors
Inorganic Chemistry ( IF 4.3 ) Pub Date : 2023-01-23 , DOI: 10.1021/acs.inorgchem.2c03540 Na Li 1 , Shuaishuai Yu 1 , Lei Zhao 1, 2 , Pengfei Zhang 1 , Ziqi Wang 1 , Zhiting Wei 1 , Wenbo Chen 3 , Xuhui Xu 4
Inorganic Chemistry ( IF 4.3 ) Pub Date : 2023-01-23 , DOI: 10.1021/acs.inorgchem.2c03540 Na Li 1 , Shuaishuai Yu 1 , Lei Zhao 1, 2 , Pengfei Zhang 1 , Ziqi Wang 1 , Zhiting Wei 1 , Wenbo Chen 3 , Xuhui Xu 4
Affiliation
|
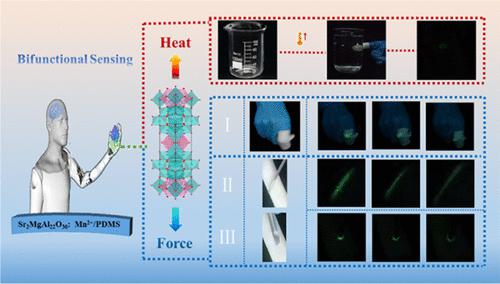
Tactile sensing with stress and temperature sensing as core elements have shown promising prospects in intelligent robots and the human–machine interface. Mechanoluminescence (ML)-based stress sensing can realize the direct sensing of mechanical stimulation, whereas indirect temperature sensing based on luminescent sensing materials usually requires the stimulation of extra light or force. Herein, a trap-controlled material Sr2MgAl22O36:Mn2+ with bifunctional mechano/thermal sensing applications was developed and investigated in detail. Visualized bright green-emitting ML and thermally stimulated luminescence (TSL) directly and rapidly responded to mechano/thermal dual stimulation in the Sr2MgAl22O36:Mn2+/PDMS composite film. It is worth mentioning that this study proposed a new idea of direct temperature sensing by the initial intensity of TSL due to thermal–photo energy conversion, unlike previous temperature sensor technology. Based on this, we designed a flexible optical skin with a simple structure and verified its application prospect as a tactile sensing material with dual mechano/thermal response, establishing a unique imaging mode and providing a convenient, reliable, and sensitive way to remotely visualize the distribution of stress and temperature. This study paves a new way for the development of optical skins with simple structures and sensitive visibility in the application of intelligent robot tactile sensing.
中文翻译:

基于机械发光和热刺激发光的可恢复双模式响应传感材料用于非接触式触觉传感器
以压力和温度传感为核心要素的触觉传感在智能机器人和人机界面方面显示出广阔的前景。基于机械发光(ML)的应力传感可以实现机械刺激的直接传感,而基于发光传感材料的间接温度传感通常需要额外的光或力的刺激。在此,开发并详细研究了具有双功能机械/热传感应用的陷阱控制材料 Sr 2 MgAl 22 O 36 :Mn 2+ 。可视化明亮的绿色发光 ML 和热激发发光 (TSL) 直接快速响应 Sr 2 MgAl中的机械/热双重刺激22 O 36 :Mn 2+ /PDMS复合膜。值得一提的是,与以往的温度传感器技术不同,这项研究提出了一种通过热-光能量转换引起的 TSL 初始强度直接感测温度的新思路。基于此,我们设计了一种结构简单的柔性光学皮肤,并验证了其作为具有双重机械/热响应的触觉传感材料的应用前景,建立了独特的成像模式,为远程可视化提供了一种方便、可靠、灵敏的方式。应力和温度的分布。该研究为开发结构简单、能见度灵敏的光学蒙皮在智能机器人触觉传感中的应用开辟了一条新途径。
更新日期:2023-01-23
中文翻译:
基于机械发光和热刺激发光的可恢复双模式响应传感材料用于非接触式触觉传感器
以压力和温度传感为核心要素的触觉传感在智能机器人和人机界面方面显示出广阔的前景。基于机械发光(ML)的应力传感可以实现机械刺激的直接传感,而基于发光传感材料的间接温度传感通常需要额外的光或力的刺激。在此,开发并详细研究了具有双功能机械/热传感应用的陷阱控制材料 Sr 2 MgAl 22 O 36 :Mn 2+ 。可视化明亮的绿色发光 ML 和热激发发光 (TSL) 直接快速响应 Sr 2 MgAl中的机械/热双重刺激22 O 36 :Mn 2+ /PDMS复合膜。值得一提的是,与以往的温度传感器技术不同,这项研究提出了一种通过热-光能量转换引起的 TSL 初始强度直接感测温度的新思路。基于此,我们设计了一种结构简单的柔性光学皮肤,并验证了其作为具有双重机械/热响应的触觉传感材料的应用前景,建立了独特的成像模式,为远程可视化提供了一种方便、可靠、灵敏的方式。应力和温度的分布。该研究为开发结构简单、能见度灵敏的光学蒙皮在智能机器人触觉传感中的应用开辟了一条新途径。






























 京公网安备 11010802027423号
京公网安备 11010802027423号