当前位置:
X-MOL 学术
›
npj Flex. Electron.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
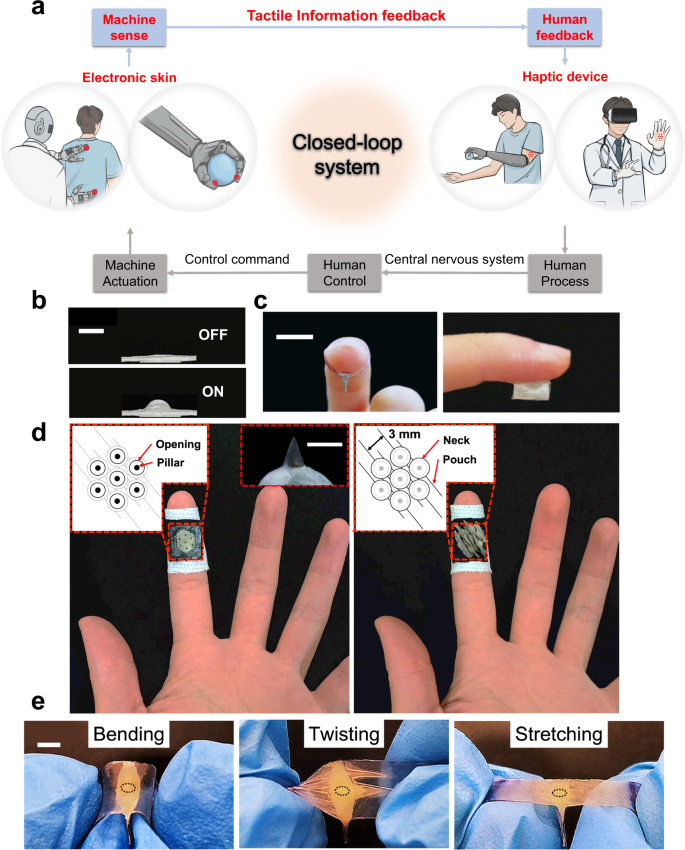
皮肤集成可拉伸致动器,实现皮肤兼容的触觉反馈和闭环人机交互
npj Flexible Electronics ( IF 12.3 ) Pub Date : 2023-01-11 , DOI: 10.1038/s41528-022-00235-y Si Chen , Yanjun Chen , Ji Yang , Teng Han , Shanshan Yao

"点击查看英文标题和摘要"
更新日期:2023-01-11
npj Flexible Electronics ( IF 12.3 ) Pub Date : 2023-01-11 , DOI: 10.1038/s41528-022-00235-y Si Chen , Yanjun Chen , Ji Yang , Teng Han , Shanshan Yao
|
可以将大量信息从机器传递给人类的皮肤集成触觉界面引起了极大的兴趣。然而,现有的触觉设备还不能产生与皮肤兼容的触觉提示。在这项工作中,我们提出了用于触觉反馈的可拉伸软致动器,它可以匹配皮肤的感知范围、空间分辨率和可拉伸性。压力放大结构采用可扩展的自组装工艺制造,以确保输出压力超过皮肤感知阈值。由于最小化的设备尺寸,致动器阵列可以制造具有足够高的空间分辨率,这使得触觉设备适用于具有最高空间敏锐度的皮肤位置。通过使用开发的软致动器和高灵敏度压力传感器来演示触觉反馈系统。开发了两个概念验证应用程序来说明将与机器人端获取的表面纹理和物体形状相关的信息传输到用户端的能力。
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号