当前位置:
X-MOL 学术
›
Artificial Life and Robotics
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
通过自学自动课程学习为机器人群产生集体跳墙行为
Artificial Life and Robotics Pub Date : 2022-11-29 , DOI: 10.1007/s10015-022-00833-z Xiaotong Nie , Yupeng Liang , Ziyao Han , Kazuhiro Ohkura

"点击查看英文标题和摘要"
更新日期:2022-11-30
Artificial Life and Robotics Pub Date : 2022-11-29 , DOI: 10.1007/s10015-022-00833-z Xiaotong Nie , Yupeng Liang , Ziyao Han , Kazuhiro Ohkura
|
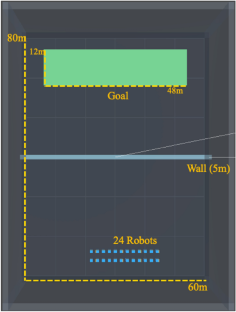
群体机器人 (SR) 是关于如何设计大量机器人以使它们能够产生有意义的集体行为的研究领域。设计控制策略的一种有前途的方法是强化学习 (RL)。然而,众所周知,稀疏奖励问题可能会出现,尤其是在解决高度复杂的问题时。课程学习(CL)可以成为克服这一困难的有效途径之一。在本文中,我们提出了一种称为自学自动课程学习 (STACL) 的新方法。不同课程的训练进度由智能体进行比较,以确定下一集应该训练哪一课。集体跳墙任务,其中机器人必须产生集体跳墙行为以越过高墙并尽快到达目标,用于说明效果。仿真结果表明,该方法具有最快的收敛速度和最稳定的性能。此外,我们还进行了实验来检验所开发控制器的灵活性。
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号