当前位置:
X-MOL 学术
›
ACS Appl. Electron. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Orientational Co Nanorod-Enabled Ferromagnetic Hydrogel Actuators with Diverse Hosts
ACS Applied Electronic Materials ( IF 4.3 ) Pub Date : 2022-11-23 , DOI: 10.1021/acsaelm.2c01155
Peng Zhao 1 , Yuanyuan Li 2 , Xiaoduo Liu 1 , Ningfei Sun 1 , Tonghua Hu 1 , Yong Xie 1, 3
ACS Applied Electronic Materials ( IF 4.3 ) Pub Date : 2022-11-23 , DOI: 10.1021/acsaelm.2c01155
Peng Zhao 1 , Yuanyuan Li 2 , Xiaoduo Liu 1 , Ningfei Sun 1 , Tonghua Hu 1 , Yong Xie 1, 3
Affiliation
|
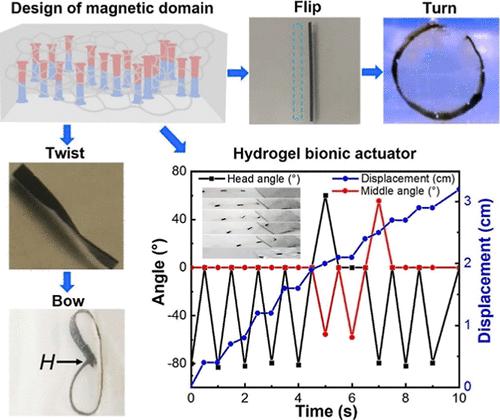
Magnetic hydrogel actuators have promising applications in soft robots, wastewater treatment, and underwater detection due to the advantages of their remote control and high magnetic penetration. However, their controllability is limited by the general fabrication methods of doping paramagnetic nanoparticles and nonuniform ferromagnetic nanoparticles with a weak or nonconfigurable magnetic distribution. Herein, we report a kind of ferromagnetic hydrogel actuator comprising oriented ferromagnetic Co nanorods with high magnetic anisotropy, and the magnetic domains can be flexibly programmed by external fields. To demonstrate the generality of the approach and to research how the flexibility of the hydrogel hosts influences the behavior of the actuators, three kinds of hydrogel hosts have been used, including silica hydrogel, cellulose hydrogel, and clay hydrogel. The silica hydrogel actuators provide a holistic response. The cellulose hydrogel actuator can achieve a certain degree of deformation. The clay hydrogel actuators are capable of achieving large deformations such as the knot and the bow-knot. Furthermore, biomimetic actuators with the capacities for wriggling, paddling, and climbing simple obstacles are designed by utilizing the bending deformations of the clay hydrogel. In conclusion, this work provides an alternative strategy for designing and fabricating magnetically actuated hydrogel actuators for imitating biological units or constructing soft robots by regulating the orientation and distribution of ferromagnetic nanoparticles.
中文翻译:

具有不同宿主的定向钴纳米棒铁磁水凝胶致动器
磁性水凝胶致动器由于其远程控制和高磁穿透等优点,在软体机器人、废水处理和水下探测等方面具有广阔的应用前景。然而,它们的可控性受到掺杂顺磁纳米粒子和具有弱或不可配置的磁分布的非均匀铁磁纳米粒子的一般制造方法的限制。在此,我们报告了一种铁磁水凝胶致动器,其包含具有高磁各向异性的定向铁磁钴纳米棒,并且磁畴可以通过外部场灵活编程。为了证明该方法的普遍性并研究水凝胶主体的柔韧性如何影响执行器的行为,使用了三种水凝胶主体,包括二氧化硅水凝胶、纤维素水凝胶、和粘土水凝胶。硅水凝胶致动器提供整体响应。纤维素水凝胶致动器可以实现一定程度的变形。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。
更新日期:2022-11-23
中文翻译:
具有不同宿主的定向钴纳米棒铁磁水凝胶致动器
磁性水凝胶致动器由于其远程控制和高磁穿透等优点,在软体机器人、废水处理和水下探测等方面具有广阔的应用前景。然而,它们的可控性受到掺杂顺磁纳米粒子和具有弱或不可配置的磁分布的非均匀铁磁纳米粒子的一般制造方法的限制。在此,我们报告了一种铁磁水凝胶致动器,其包含具有高磁各向异性的定向铁磁钴纳米棒,并且磁畴可以通过外部场灵活编程。为了证明该方法的普遍性并研究水凝胶主体的柔韧性如何影响执行器的行为,使用了三种水凝胶主体,包括二氧化硅水凝胶、纤维素水凝胶、和粘土水凝胶。硅水凝胶致动器提供整体响应。纤维素水凝胶致动器可以实现一定程度的变形。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。粘土水凝胶致动器能够实现大变形,例如结和蝴蝶结。此外,利用粘土水凝胶的弯曲变形设计了具有扭动、划水和攀爬简单障碍物能力的仿生执行器。总之,这项工作为设计和制造用于模拟生物单元或通过调节铁磁纳米粒子的方向和分布构建软机器人的磁致动水凝胶致动器提供了一种替代策略。






























 京公网安备 11010802027423号
京公网安备 11010802027423号