Frontiers of Mechanical Engineering Pub Date : 2022-11-08 , DOI: 10.1007/s11465-022-0699-x Kun Xu , Peijin Zi , Xilun Ding
|
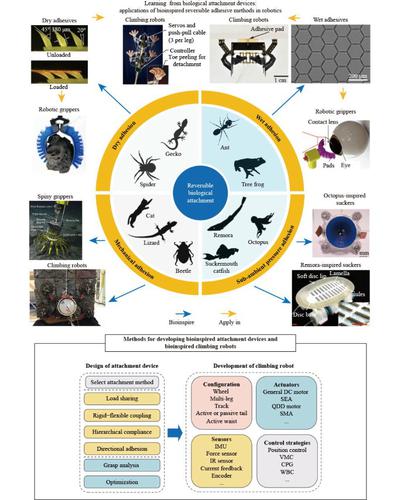
Many organisms have attachment organs with excellent functions, such as adhesion, clinging, and grasping, as a result of biological evolution to adapt to complex living environments. From nanoscale to macroscale, each type of adhesive organ has its own underlying mechanisms. Many biological adhesive mechanisms have been studied and can be incorporated into robot designs. This paper presents a systematic review of reversible biological adhesive methods and the bioinspired attachment devices that can be used in robotics. The study discussed how biological adhesive methods, such as dry adhesion, wet adhesion, mechanical adhesion, and sub-ambient pressure adhesion, progress in research. The morphology of typical adhesive organs, as well as the corresponding attachment models, is highlighted. The current state of bioinspired attachment device design and fabrication is discussed. Then, the design principles of attachment devices are summarized in this article. The following section provides a systematic overview of climbing robots with bioinspired attachment devices. Finally, the current challenges and opportunities in bioinspired attachment research in robotics are discussed.
中文翻译:
从生物附着装置中学习:仿生可逆粘合方法在机器人技术中的应用
由于生物进化适应复杂的生存环境,许多生物体具有粘附、附着、抓握等优良功能的附着器官。从纳米尺度到宏观尺度,每种类型的粘附器官都有其自身的潜在机制。已经研究了许多生物粘附机制,并且可以将其纳入机器人设计中。本文对可用于机器人技术的可逆生物粘合方法和仿生附着装置进行了系统评价。该研究讨论了生物粘合方法,如干法粘合、湿法粘合、机械粘合和亚环境压力粘合,研究进展如何。突出了典型粘附器官的形态以及相应的附着模型。讨论了仿生附件装置设计和制造的现状。然后,本文总结了附件设备的设计原则。以下部分系统概述了具有仿生附着装置的攀爬机器人。最后,讨论了机器人技术中仿生附着研究的当前挑战和机遇。




















































 京公网安备 11010802027423号
京公网安备 11010802027423号