当前位置:
X-MOL 学术
›
npj Flex. Electron.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
将身体安装的超软有机太阳能电池集成到具有完整机动性的机器人昆虫身上
npj Flexible Electronics ( IF 12.3 ) Pub Date : 2022-09-05 , DOI: 10.1038/s41528-022-00207-2 Yujiro Kakei , Shumpei Katayama , Shinyoung Lee , Masahito Takakuwa , Kazuya Furusawa , Shinjiro Umezu , Hirotaka Sato , Kenjiro Fukuda , Takao Someya

"点击查看英文标题和摘要"
更新日期:2022-09-05
npj Flexible Electronics ( IF 12.3 ) Pub Date : 2022-09-05 , DOI: 10.1038/s41528-022-00207-2 Yujiro Kakei , Shumpei Katayama , Shinyoung Lee , Masahito Takakuwa , Kazuya Furusawa , Shinjiro Umezu , Hirotaka Sato , Kenjiro Fukuda , Takao Someya
|
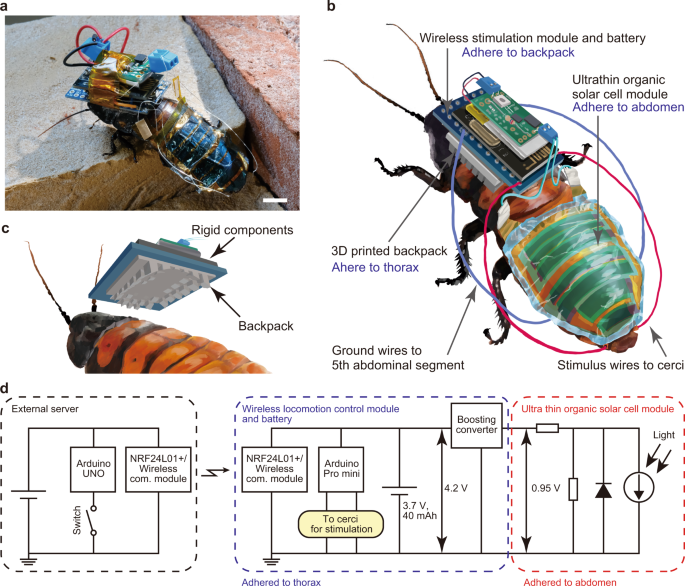
机器人昆虫已被提出用于城市搜索和救援等应用。安装在身体上的能量收集装置对于扩大机器人昆虫的活动范围和功能至关重要。然而,它们的功率输出被限制在 1 mW 以下,这比无线运动控制所需的功率要低得多。能量收集装置的面积和负载极大地影响了微型机器人的移动性。在这里,我们描述了一种超软有机太阳能电池模块在机器人昆虫上的集成,该模块保留了它们的运动能力。我们的量化系统设计策略结合了超薄膜电子器件和粘合剂-非粘合剂交错结构来执行基本的昆虫运动,成功地实现了基本的穿越和自我纠正运动。安装在车身上的超薄有机太阳能电池模块实现了17.2 mW的功率输出。我们通过展示机器人昆虫的充电无线运动控制来证明其可行性。
"点击查看英文标题和摘要"












































 京公网安备 11010802027423号
京公网安备 11010802027423号