当前位置:
X-MOL 学术
›
J. Bionic Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
用于接触状态估计的软仿生手指的建模与分析
Journal of Bionic Engineering ( IF 4.9 ) Pub Date : 2022-08-08 , DOI: 10.1007/s42235-022-00222-z Yongyao Li , Ming Cong , Dong Liu , Yu Du

"点击查看英文标题和摘要"
更新日期:2022-08-09
Journal of Bionic Engineering ( IF 4.9 ) Pub Date : 2022-08-08 , DOI: 10.1007/s42235-022-00222-z Yongyao Li , Ming Cong , Dong Liu , Yu Du
|
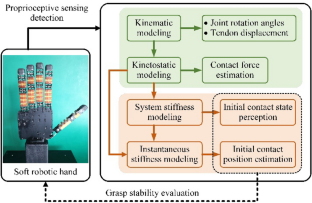
接触状态估计对于评估仿生手的抓握稳定性具有重要意义,尤其是在未知环境或没有视觉/触觉反馈的情况下。它仍然具有挑战性,特别是对于没有在柔软手指上集成复杂外部传感器的柔软仿生手。针对这一问题,提出了一种基于本体感觉的系统解决方案,用于估计单次抓握中软仿生手指的接触状态。首先开发了软手指的运动学模型来捕捉关节旋转角度和肌腱位移。进一步建立了动力学模型来估计软手指与物体接触时的接触力。在此基础上,提出了软手指在预成形和与物体初始接触过程中的系统刚度模型,用于感知接触状态。而且,建立了初始接触发生时软手指的瞬时刚度模型,用于估计某些指骨上的接触位置,特别是沿远端指骨的接触位置。所提出的基于本体感觉的方法是软手指中的第一个应用,无需集成复杂的外部传感器,这使得它们简洁实用。进行了实验以证明我们的建议的有效性和效率。
"点击查看英文标题和摘要"




















































 京公网安备 11010802027423号
京公网安备 11010802027423号