当前位置:
X-MOL 学术
›
Int. J. Mach. Tool Manu.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
机器人结构模式对铣削再生颤振的影响研究及稳定性边界改进域分析
International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2022-07-07 , DOI: 10.1016/j.ijmachtools.2022.103918 Shihao Xin , Fangyu Peng , Xiaowei Tang , Rong Yan , Zepeng Li , Jiawei Wu

"点击查看英文标题和摘要"
更新日期:2022-07-11
International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2022-07-07 , DOI: 10.1016/j.ijmachtools.2022.103918 Shihao Xin , Fangyu Peng , Xiaowei Tang , Rong Yan , Zepeng Li , Jiawei Wu
|
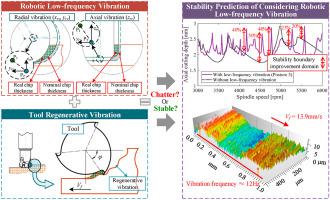
再生颤振是影响机器人铣削大型复杂曲面零件效率和质量的重要因素,尤其是在几何干涉下强制选择弱刚体姿态时。而机器人铣削中的再生颤振不仅与刀轴模式有关,而且还受到机器人结构模式引起的刀点低频振动的影响。在特定的主轴转速下,刀点低频振动打断了颤振的发生过程,增加了临界切削深度,并产生了一个稳定边界改进域(SBID)。这种现象可以避免机器人结构刚度弱的不利影响,保证甚至提高加工效率。为揭示低频振动改善稳定性边界的机理,分析了考虑机器人结构模式引起的刀点低频振动的刀具-工件接合状态,以及径向和切向刀具-工件分离模型、时间-建立了变过程阻尼模型和轴向切削深度调制模型来描述刀具与工件啮合状态的机理。然后提出了依赖于切割状态的时延系数。最后,建立了考虑机器人结构模式引起的工具点低频振动的稳定性预测模型,并通过不同姿态的实验进行了验证。通过不同姿势的模拟和实验,提出了一套评价指标来评价低频振动的影响,发现不同的机器人姿态会导致不同的SBID,从而证明姿态优化对稳定性提升的有效性。结果表明,所提出的机器人铣削稳定性模型能够有效表征低频振动对稳定性边界的影响,为SBID的精确定位和高效的机器人铣削提供理论依据。
"点击查看英文标题和摘要"












































 京公网安备 11010802027423号
京公网安备 11010802027423号