Multibody System Dynamics ( IF 2.6 ) Pub Date : 2022-06-06 , DOI: 10.1007/s11044-022-09829-w Runsen Zhang , Huimin Zhang , Andrea Zanoni , Alessandro Tasora , Pierangelo Masarati
|
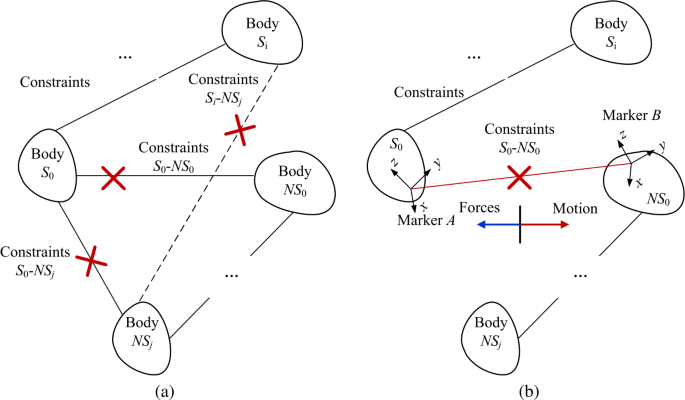
An explicit cosimulation scheme is developed to study the coupling of smooth and nonsmooth systems using kinematic constraints. Using the force-displacement decomposition, the coupling constraints are formulated at the velocity level, to preserve consistency with the impulse-momentum equations for frictional contacts in the nonsmooth solver, which however potentially leads to instability of the explicit cosimulation. To improve the stability of the cosimulation without affecting the format of the coupling constraints, guidelines for the modification of the prescribed motion are developed following the spirit of Baumgarte’s stabilization technique and the characteristics of the proposed integration scheme, which prescribes a combination of position, velocity, and acceleration to the constrained bodies. Using modified inputs, the stability of the cosimulation is tested using a rigidly connected two-mass oscillator model, which shows clear improvement compared to that with unaltered inputs. The performances of the cosimulation with modified inputs are further illustrated using a double-pendulum system and a complex flexible multibody system coupled with a particle damper. It follows that cosimulation results well agree with those obtained using monolithic simulation or simplified models, verifying the explicit smooth/nonsmooth cosimulation. The results also show a higher efficiency of the explicit cosimulation scheme, which requires much less computational time to obtain similar results, compared to the implicit smooth/nonsmooth cosimulation.
中文翻译:
使用运动学约束的显式平滑/非平滑协同仿真
开发了一种显式联合仿真方案来研究使用运动学约束的光滑和非光滑系统的耦合。使用力-位移分解,在速度级别制定耦合约束,以保持与非光滑求解器中摩擦接触的冲量-动量方程的一致性,但这可能会导致显式协同仿真的不稳定性。为了在不影响耦合约束格式的情况下提高协同仿真的稳定性,根据 Baumgarte 稳定技术的精神和所提出的积分方案的特点,制定了修改规定运动的指南,该方案规定了位置、速度的组合,以及对受约束物体的加速度。使用修改后的输入,使用刚性连接的两质量振荡器模型测试了协同仿真的稳定性,与未改变输入的情况相比,该模型显示出明显的改进。使用双摆系统和与粒子阻尼器耦合的复杂柔性多体系统进一步说明了修改输入的协同仿真的性能。因此,协同仿真结果与使用单片仿真或简化模型获得的结果非常吻合,验证了显式平滑/非平滑协同仿真。结果还表明,与隐式平滑/非平滑协同仿真相比,显式协同仿真方案的效率更高,获得类似结果所需的计算时间要少得多。与未更改的输入相比,这显示出明显的改进。使用双摆系统和与粒子阻尼器耦合的复杂柔性多体系统进一步说明了修改输入的协同仿真的性能。因此,协同仿真结果与使用单片仿真或简化模型获得的结果非常吻合,验证了显式平滑/非平滑协同仿真。结果还表明,与隐式平滑/非平滑协同仿真相比,显式协同仿真方案的效率更高,获得类似结果所需的计算时间要少得多。与未更改的输入相比,这显示出明显的改进。使用双摆系统和与粒子阻尼器耦合的复杂柔性多体系统进一步说明了修改输入的协同仿真的性能。因此,协同仿真结果与使用单片仿真或简化模型获得的结果非常吻合,验证了显式平滑/非平滑协同仿真。结果还表明,与隐式平滑/非平滑协同仿真相比,显式协同仿真方案的效率更高,获得类似结果所需的计算时间要少得多。因此,协同仿真结果与使用单片仿真或简化模型获得的结果非常吻合,验证了显式平滑/非平滑协同仿真。结果还表明,与隐式平滑/非平滑协同仿真相比,显式协同仿真方案的效率更高,获得类似结果所需的计算时间要少得多。因此,协同仿真结果与使用单片仿真或简化模型获得的结果非常吻合,验证了显式平滑/非平滑协同仿真。结果还表明,与隐式平滑/非平滑协同仿真相比,显式协同仿真方案的效率更高,获得类似结果所需的计算时间要少得多。






























 京公网安备 11010802027423号
京公网安备 11010802027423号