当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Liquid Crystal Elastomer with Integrated Soft Thermoelectrics for Shape Memory Actuation and Energy Harvesting
Advanced Materials ( IF 27.4 ) Pub Date : 2022-04-05 , DOI: 10.1002/adma.202200857 Mason Zadan 1 , Dinesh K Patel 2 , Andrew P Sabelhaus 1 , Jiahe Liao 3 , Anthony Wertz 3 , Lining Yao 2 , Carmel Majidi 1, 3
Advanced Materials ( IF 27.4 ) Pub Date : 2022-04-05 , DOI: 10.1002/adma.202200857 Mason Zadan 1 , Dinesh K Patel 2 , Andrew P Sabelhaus 1 , Jiahe Liao 3 , Anthony Wertz 3 , Lining Yao 2 , Carmel Majidi 1, 3
Affiliation
|
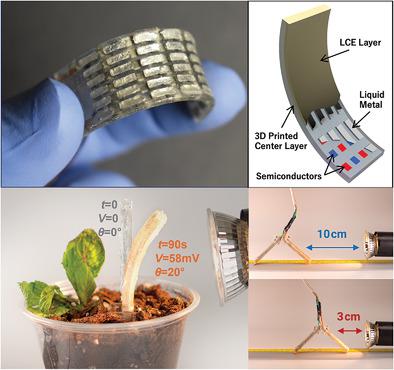
Liquid crystal elastomers (LCEs) have attracted tremendous interest as actuators for soft robotics due to their mechanical and shape memory properties. However, LCE actuators typically respond to thermal stimulation through active Joule heating and passive cooling, which make them difficult to control. In this work, LCEs are combined with soft, stretchable thermoelectrics to create transducers capable of electrically controlled actuation, active cooling, and thermal-to-electrical energy conversion. The thermoelectric layers are composed of semiconductors embedded within a 3D printed elastomer matrix and wired together with eutectic gallium–indium (EGaIn) liquid metal interconnects. This layer is covered on both sides with LCE, which alternately heats and cools to achieve cyclical bending actuation in response to voltage-controlled Peltier activation. Moreover, the thermoelectric layer can harvest energy from thermal gradients between the two LCE layers through the Seebeck effect, allowing for regenerative energy harvesting. As demonstrations, first, closed-loop control of the transducer is performed to rapidly track a changing actuator position. Second, a soft robotic walker that is capable of walking toward a heat source and harvesting energy is introduced. Lastly, phototropic-inspired autonomous deflection of the limbs toward a heat source is shown, demonstrating an additional method to increase energy recuperation efficiency for soft systems.
中文翻译:

用于形状记忆驱动和能量收集的集成软热电的液晶弹性体
由于其机械和形状记忆特性,液晶弹性体 (LCE) 作为软机器人的致动器引起了极大的兴趣。然而,LCE 致动器通常通过主动焦耳加热和被动冷却来响应热刺激,这使得它们难以控制。在这项工作中,LCE 与柔软、可拉伸的热电材料相结合,创造出能够电控驱动、主动冷却和热电能量转换的传感器。热电层由嵌入 3D 打印弹性体基质中的半导体组成,并与共晶镓铟 (EGaIn) 液态金属互连线连接在一起。该层两面都覆盖有LCE,它交替加热和冷却以响应电压控制的 Peltier 激活实现循环弯曲驱动。此外,热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。介绍了一种能够走向热源并收集能量的软机器人助行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。介绍了一种能够走向热源并收集能量的软机器人助行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。
更新日期:2022-04-05
中文翻译:
用于形状记忆驱动和能量收集的集成软热电的液晶弹性体
由于其机械和形状记忆特性,液晶弹性体 (LCE) 作为软机器人的致动器引起了极大的兴趣。然而,LCE 致动器通常通过主动焦耳加热和被动冷却来响应热刺激,这使得它们难以控制。在这项工作中,LCE 与柔软、可拉伸的热电材料相结合,创造出能够电控驱动、主动冷却和热电能量转换的传感器。热电层由嵌入 3D 打印弹性体基质中的半导体组成,并与共晶镓铟 (EGaIn) 液态金属互连线连接在一起。该层两面都覆盖有LCE,它交替加热和冷却以响应电压控制的 Peltier 激活实现循环弯曲驱动。此外,热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。热电层可以通过塞贝克效应从两个 LCE 层之间的热梯度中收集能量,从而实现再生能量收集。作为演示,首先,执行换能器的闭环控制以快速跟踪不断变化的致动器位置。其次,引入了一种能够向热源行走并收集能量的软机器人步行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。介绍了一种能够走向热源并收集能量的软机器人助行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。介绍了一种能够走向热源并收集能量的软机器人助行器。最后,展示了受光致性启发的四肢向热源的自主偏转,展示了另一种提高软系统能量回收效率的方法。





























 京公网安备 11010802027423号
京公网安备 11010802027423号