Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Multifunctional Electronic Skins Enable Robots to Safely and Dexterously Interact with Human
Advanced Science ( IF 14.3 ) Pub Date : 2022-02-16 , DOI: 10.1002/advs.202104969 Guozhen Li 1 , Shiqiang Liu 1 , Qian Mao 1 , Rong Zhu 1
Advanced Science ( IF 14.3 ) Pub Date : 2022-02-16 , DOI: 10.1002/advs.202104969 Guozhen Li 1 , Shiqiang Liu 1 , Qian Mao 1 , Rong Zhu 1
Affiliation
|
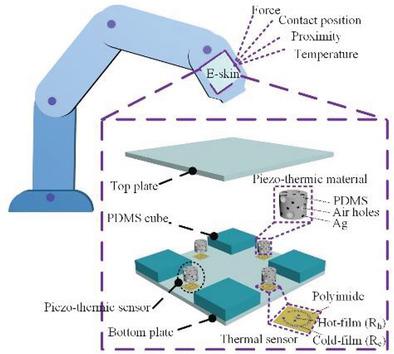
Human–robot collaboration is playing more and more important roles in current deployments of robotic systems in our lives. Haptic perception and intelligent control are essential to ensure safety and efficiency of human–robot interaction. However, existing robotic sensory and control systems are deficient in terms of performance issues, complexity, and cost. Here, the authors report a multifunctional electronic skin (e-skin) incorporating multiple perceptions with intelligent robotic control, by which robots can safely and dexterously interact with humans. The e-skin with a simple and cost-effective sensory structure has multimodal perceptions of proximity, temperature, contact force, and contact position with broad measuring range, high sensitivity, and fast response. The e-skin is applied onto robots to accomplish obstacle avoidance, safe and dexterous human–robot interaction, smart teaching, and playing Tai-Chi, which demonstrate a broad range of applications for intelligent robots equipped with e-skins.
中文翻译:

多功能电子皮肤使机器人能够安全灵巧地与人类交互
人机协作在我们生活中当前的机器人系统部署中发挥着越来越重要的作用。触觉感知和智能控制对于确保人机交互的安全性和效率至关重要。然而,现有的机器人传感和控制系统在性能问题、复杂性和成本方面存在缺陷。在这里,作者报告了一种将多种感知与智能机器人控制相结合的多功能电子皮肤(e-skin),通过这种皮肤,机器人可以安全、灵巧地与人类互动。电子皮肤具有简单且经济高效的传感结构,具有接近、温度、接触力和接触位置的多模态感知,具有宽测量范围、高灵敏度和快速响应。将电子皮肤应用在机器人上,可以实现避障、安全灵巧的人机交互、智能教学、打太极等,展示了电子皮肤智能机器人的广泛应用前景。
更新日期:2022-02-16
中文翻译:
多功能电子皮肤使机器人能够安全灵巧地与人类交互
人机协作在我们生活中当前的机器人系统部署中发挥着越来越重要的作用。触觉感知和智能控制对于确保人机交互的安全性和效率至关重要。然而,现有的机器人传感和控制系统在性能问题、复杂性和成本方面存在缺陷。在这里,作者报告了一种将多种感知与智能机器人控制相结合的多功能电子皮肤(e-skin),通过这种皮肤,机器人可以安全、灵巧地与人类互动。电子皮肤具有简单且经济高效的传感结构,具有接近、温度、接触力和接触位置的多模态感知,具有宽测量范围、高灵敏度和快速响应。将电子皮肤应用在机器人上,可以实现避障、安全灵巧的人机交互、智能教学、打太极等,展示了电子皮肤智能机器人的广泛应用前景。














































 京公网安备 11010802027423号
京公网安备 11010802027423号