Medical & Biological Engineering & Computing ( IF 2.6 ) Pub Date : 2021-03-07 , DOI: 10.1007/s11517-021-02341-x Haibo Wang 1 , Siyang Zuo 1
|
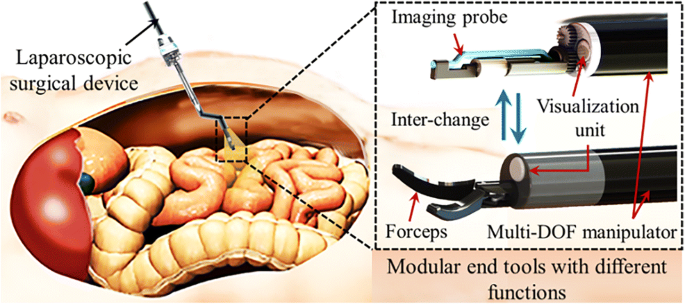
In recent years, laparoscopic surgery attracts considerable attention for its distinct advantages owing to minimized invasiveness. However, traditional surgical instruments have a single function and lack the ability to provide high-resolution images for real-time tissue assessment. Thus, it remains a challenge to perform complex procedures with the traditional surgical instruments. In this paper, a novel laparoscopic surgical device for real-time endomicroscopy and therapy is proposed. The device is integrated with a visualization unit to provide endoscopic images in a constrained cavity for real-time observation. Moreover, modular end tools can be assembled and switched with the multi-DOF manipulator. The experimental results demonstrate that the surface-scanning tool can perform smooth scanning and obtain a large area mosaic of 6.99 mm2 in 40.2 s for tissue assessment. The spring-loaded forceps can generate an output force of 1.47 N to manipulate tissue. These experimental results demonstrate the potential value of the device for intraoperative endomicroscopy-guided surgery and robot-assisted surgery.
Graphical abstract
中文翻译:
带有模块化末端工具的腹腔镜手术设备,用于实时内窥镜检查和治疗
近年来,腹腔镜手术因其侵入性最小的独特优势而备受关注。然而,传统的手术器械功能单一,缺乏为实时组织评估提供高分辨率图像的能力。因此,使用传统的手术器械执行复杂的手术仍然是一个挑战。在本文中,提出了一种用于实时内窥镜检查和治疗的新型腹腔镜手术设备。该设备与可视化单元集成,可在受限腔内提供内窥镜图像以进行实时观察。此外,模块化末端工具可以与多自由度机械手组装和切换。实验结果表明,表面扫描工具可以进行平滑扫描并获得6.99 mm的大面积马赛克2在 40.2 秒内进行组织评估。弹簧钳可以产生 1.47 N 的输出力来操纵组织。这些实验结果证明了该装置在术中内镜引导手术和机器人辅助手术中的潜在价值。

















































 京公网安备 11010802027423号
京公网安备 11010802027423号