当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Transformable Pneumatic Balloon‐Type Soft Robot Using Attachable Shells
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-05-27 , DOI: 10.1002/admt.202000201 Toshiki Nakajima 1 , Takafumi Yamaguchi 1 , Seiji Wakabayashi 1 , Takayuki Arie 1 , Seiji Akita 1 , Kuniharu Takei 1, 2
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2020-05-27 , DOI: 10.1002/admt.202000201 Toshiki Nakajima 1 , Takafumi Yamaguchi 1 , Seiji Wakabayashi 1 , Takayuki Arie 1 , Seiji Akita 1 , Kuniharu Takei 1, 2
Affiliation
|
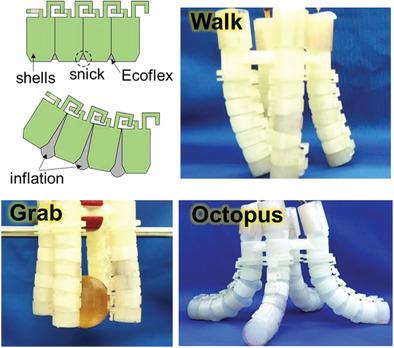
Safe and convenient human‐interactive robots are of great interests to support human life. A pneumatic balloon‐type soft robot operated by air or water pressure has potential for soft and gentle interactions with humans. However, the device design often limits the actuation direction. If this motion can be readily tuned, one design can be used in different applications. This study proposes a transformable pneumatic balloon‐type soft robot using attachable shells. The actuating direction can be tuned by the shell structure over a pneumatic balloon‐based tube. The shells can be fabricated via a 3D printer using hard‐ or soft‐materials. After characterizing the bending force and angle of the soft actuator, three robot applications are demonstrated—walking, grabbing a ball, and an octopus‐like motion. Although the mechanical robustness, especially for soft shells, needs to be improved for practical applications, this concept has potential to realize innovative pneumatic balloon‐based robotics.
中文翻译:

使用可连接外壳的可变形气动气球型软机器人
安全便捷的人机交互机器人对于支持人类生命具有重大意义。通过气压或水压操作的气动气球式软机器人具有与人进行柔和轻柔交互的潜力。然而,设备设计经常限制致动方向。如果可以轻松调整此运动,则可以在不同的应用程序中使用一种设计。这项研究提出了一种使用可连接外壳的可变形气动气球式软机器人。可以通过基于气球的气动管上的壳体结构来调整执行方向。可以使用硬质或软质材料通过3D打印机制造外壳。在表征了软执行器的弯曲力和角度之后,演示了三种机器人应用程序:行走,抓球和章鱼式运动。虽然机械坚固,
更新日期:2020-07-10
中文翻译:
使用可连接外壳的可变形气动气球型软机器人
安全便捷的人机交互机器人对于支持人类生命具有重大意义。通过气压或水压操作的气动气球式软机器人具有与人进行柔和轻柔交互的潜力。然而,设备设计经常限制致动方向。如果可以轻松调整此运动,则可以在不同的应用程序中使用一种设计。这项研究提出了一种使用可连接外壳的可变形气动气球式软机器人。可以通过基于气球的气动管上的壳体结构来调整执行方向。可以使用硬质或软质材料通过3D打印机制造外壳。在表征了软执行器的弯曲力和角度之后,演示了三种机器人应用程序:行走,抓球和章鱼式运动。虽然机械坚固,




















































 京公网安备 11010802027423号
京公网安备 11010802027423号