当前位置:
X-MOL 学术
›
ACS Appl. Mater. Interfaces
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
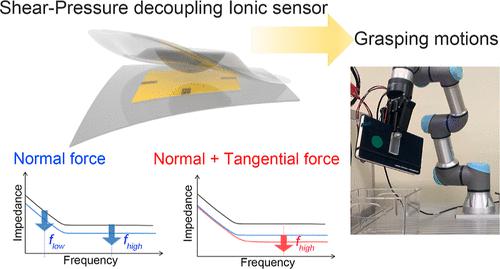
Shear-Pressure Decoupling and Accurate Perception of Shear Directions in Ionic Sensors by Analyzing the Frequency-Dependent Ionic Behavior
ACS Applied Materials & Interfaces ( IF 8.2 ) Pub Date : 2023-10-26 , DOI: 10.1021/acsami.3c12924
Wonjeong Suh , Kanghyun Ki , Taeyeong Kim , Hyeongseok Choi , Anna Lee , Unyong Jeong
ACS Applied Materials & Interfaces ( IF 8.2 ) Pub Date : 2023-10-26 , DOI: 10.1021/acsami.3c12924
Wonjeong Suh , Kanghyun Ki , Taeyeong Kim , Hyeongseok Choi , Anna Lee , Unyong Jeong
|
In artificial tactile sensing, to emulate the human sense of touch, independent perception of shear force and pressure is important. Decoupling the pressure and shear force is a challenging task for ensuring stable grasping manipulation for both soft and brittle objects. This study introduces a deformable ion gel-based tactile sensor that is capable of distinguishing pressure from shear force when pressurized shear force is applied in any direction. Recognition of the decoupled forces and precise shear directions is enabled by acquiring tactile data at only two frequencies (20 Hz and 10 kHz) based on the frequency-dependent ion dynamics. This study demonstrates monitoring the changes in pressure, shear force, and shear directions while performing practical robotic actions, such as pouring a water bottle, opening a water bottle cap, and picking up a book and placing it on a shelf.
中文翻译:

通过分析与频率相关的离子行为,实现离子传感器的剪切压力解耦和剪切方向的精确感知
在人工触觉传感中,要模拟人类的触觉,对剪切力和压力的独立感知非常重要。解耦压力和剪切力是一项具有挑战性的任务,以确保对软质和脆性物体进行稳定的抓取作。本研究介绍了一种基于可变形离子凝胶的触觉传感器,当向任何方向施加加压剪切力时,它能够区分压力和剪切力。通过仅获取基于频率相关离子动力学(20 Hz 和 10 kHz)的触觉数据,可以识别解耦力和精确的剪切方向。本研究展示了在执行实际机器人动作(例如倒水瓶、打开水瓶盖、拿起一本书并将其放在书架上)时监测压力、剪切力和剪切方向的变化。
更新日期:2023-10-26
中文翻译:
通过分析与频率相关的离子行为,实现离子传感器的剪切压力解耦和剪切方向的精确感知
在人工触觉传感中,要模拟人类的触觉,对剪切力和压力的独立感知非常重要。解耦压力和剪切力是一项具有挑战性的任务,以确保对软质和脆性物体进行稳定的抓取作。本研究介绍了一种基于可变形离子凝胶的触觉传感器,当向任何方向施加加压剪切力时,它能够区分压力和剪切力。通过仅获取基于频率相关离子动力学(20 Hz 和 10 kHz)的触觉数据,可以识别解耦力和精确的剪切方向。本研究展示了在执行实际机器人动作(例如倒水瓶、打开水瓶盖、拿起一本书并将其放在书架上)时监测压力、剪切力和剪切方向的变化。

















































 京公网安备 11010802027423号
京公网安备 11010802027423号